
Y6 / TRICOPTER BAUEN
Der Y6 fliegt mit 6 Motoren, die koaxial (übereinanderliegend) auf den 3 Auslegern angeordnet sind. Gegenüber dem Quadrocopter hat er eine höhere Nutzlast, bei
etwas höherem Gewicht. Durch die Form ist er ein idealer Kameraträger.

ANORDNUNG DER MOTOREN UND STEUERPLATINE
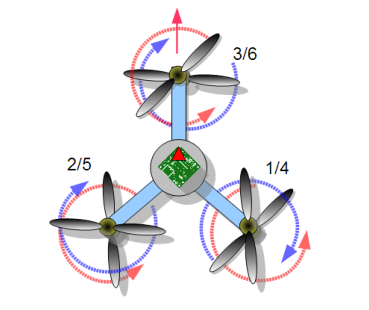
Um einen Y6 zu bauen, werden die Motoren folgendem Schema montiert.
Obere Rotor-Ebene:
1= Rechts Hinten (Rechtsdrehend)
2= Links Hinten (Linksdrehend)
3= Vorne (Rechtsdrehend)
Untere Rotor-Ebene:
4= Rechts Hinten (Linksdrehend)
5= Links Hinten (Rechtsdrehend)
6= Vorne (Linksdrehend)
Der weisse Pfeil auf der Steuerplatine muss auf Motor 3/6 (Vorne) zeigen. Der
Hexacopter kann so geflogen werden, daß vorne dem Einzelausleger entspricht
oder so daß ‘Vorne’ zwischen den Y-Auslegern liegt (idealer für Kameraflüge)
VOR- UND NACHTEILE
•
Erhöhte Nutzlast gegenüber Quadrocoptern bei leicht erhöhtem Gewicht
•
Bei Ausfall eines Motors kann der Copter noch kontrolliert gelandet werden
•
Kameramontage durch Y-Formation leichter als bei symmetrischen
Multicoptern
•
Gute Erkennung der Fluglage auch in größerer Entfernung
•
Ausfall eines Motors zwingt meist zur Landung, da der Copter zu gieren
beginnen kann
•
Unten liegende Propeller sind gefährdet bei unsanften Landungen (evtl.
Landegestell verwenden)
•
Größere Kosten (zuätzliche Motoren, größerer Flugakku) als bei
Quadrocoptern

BENÖTIGTE KOMPONENTEN
•
Steuerplatine (PCC oder Merope)
•
Y6-Rahmensystem
•
6 Brushless Motoren
•
6 I²C-Brushlessregler oder 6 Standard-Brushlessregler und eine
Extenderplatine
•
RC-Empfänger
•
Flugakku
DOWNLOADS - TABELLEN UND INFORMATIONEN
Mischer Y6 (Einzelausleger ist vorne)
Mischer Y6-Invertiert (Y-Ausleger ist vorne)
Download PDF Tricopter-Bauanleitung
LAYOUT
•
Steuerplatine (PCC oder Celaeno)
•
Tricopter-Rahmensystem
•
3 Brushless Motoren
•
3 Brushlessregler
•
RC-Empfänger
•
Flugakku
•
Gier-Servo
oder für Tricopter:








Copyright 2010 - 2012 plejad.net








