
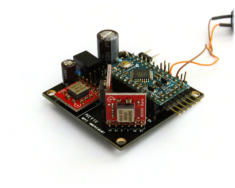
PLEJAD COPTER CONTROL UND STARDRIVE
Die leistungsfähige Multicopter-Steuerung für Selbstbauer
FEATURES
•
3-Achs Lagestabilisierung mittels hochwertiger MEMS Gyrosensoren
•
Ansteuerung von beliebig vielen Brushless-Motoren durch Unterstützung
von 4 PPM Ausgängen (8 mit PCC Extender) und I2C Bus
•
Automatische Lage-, Richtung und Positionsstabilisierung mittels des
optionalen Stardrive-Moduls
•
2 Servoausgänge (z.B. für Kamerasteuerung) und 4 schaltbare Ausgänge
•
Anschluss fuer LCD Terminal zur Parametrierung/Analyse auf dem Flugfeld
•
Dekodierung des PPM Summensignals von bis zu 8 RC Kanälen
•
Summer, LED fuer Akkuspannungswarnung und Settingswahl
•
Rund um das Standard-Arduino Board wird die gesamte Platine mit
bedrahteten, leicht beschaffbaren Bauteilen aufgebaut.

BESONDERHEITEN
•
Automatisches Einlernen der Fernsteuerkanäle und Ausschläge (incl.
Kanal-Reverse)
•
Parametrierung und Feintuning rein per Fernsteuerung und Display
möglich (keine PC-Software nötig)
•
LCD-Terminal zur einfachen Parametrierung
•
Updatefähig via USB
•
Serielle Telemetriefunktionen (optional via Bluetooth)
•
Zukünftige Erweiterungen oder selbstdesignte Erweiterungsboards
anschliessbar via serielle Schnittstelle
•
Prozessorupgrades und Multiprocessing-Support durch Austausch der
Arduino-Platine
•
Vorbereitet für GPS-Navigation (mit Stardrive Modul)
BEISPIEL
ZUSÄTZLICH BENÖTIGT
•
Fernsteuerungs-Set mit mindestens 4 Kanälen und PPM-
Summensignal Ausgabe
•
Multicopter- Rahmensystem
•
Brushless Motoren, Regler und Propeller
•
Flugakku (LiPo) mit ca. 800 - 1200 mAh und Ladegerät
SINNVOLLE ERWEITERUNGEN:
•
LCD Display Kit, um den Copter auf dem Flugfeld konfigurieren zu können









Copyright 2010 - 2012 plejad.net










